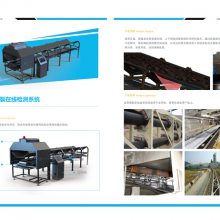
智能机器人巡检
智能巡检机器人系统控制结构分为系统与移动站系统。系统主要由网络集线器、导航定位规划系统等组成。后台工程机系统采用C++编程语言开发设计,为操作人员提供交互界面,规划机器人运动路线。移动站系统分为控制检测与移动系统模块,可实现驱动电机控制,移动站导航定位,皮带廊机器人解决方案,红外测温图像采集等功能。移动站控制程序采用C++编程语言开发设计,皮带廊机器人供应商,根据后台工程机控制命令控制运动,上传机器人采集可见光图像等数据。
巡检机器人控制系统安全要求
巡检机器人的所有部件都应在控制系统范围内且可被实时安全检测监控。机器人发生故障时,机器人应始终具备安全功能,应保持机器人在安全状态运行,皮带廊机器人厂家,如无法***安全状态,则应提醒用户及时停止机器人。
机房巡检机器人应具备速度控制。机器人可移动的部分包括底盘、升降杆、臂等都应进行速度监测,皮带廊机器人,可设定速度值。
巡检机器人作用
随着人工智能逐步与传统产业结合,物联网、云计算、5G技术为企业带来可观的经济效益和社会效益,并推动产业源端的重组升级,中国产业结构的调整让巡检机器人也迎来快速发展。以中国电网为例,智能化电网巡检机器人能克服传统人工对变电站、配电站的巡检不到位、巡检结果无法数字化的缺陷,有效节省巡检成本,提升电网系统的智能化运行水平。
西安量子智能科技有限公司 手机:𐀈𐀉𐀊𐀋𐀊𐀈𐀋𐀉𐀊𐀊 电话:𐀍𐀎𐀋𐀏𐀉𐀈𐀉𐀉𐀉𐀊𐀐 地址:陕西 西安 陕西省西安市长安区少陵路4455号